On December 8, 2021, Nature Communications published the research paper of the research group led by Associate Professor Chen Rui from the School of Mechanical and Vehicle Engineering, Chongqing University under the title “Legless soft robots capable of rapid, continuous, and steered jumping”. Chongqing University is the first signing organization. Chen Rui, Yuan Ze’an, a postgraduate student, Associate Professor Guo Jianglong of Harbin Institute of Technology (Shenzhen), and Professor Bai Long of Chongqing University are first co-authors. Chen Rui and Professor Pu Huayan from Shanghai University are corresponding co-authors.

Jumping motion effectively expands the range of motion and obstacle-surmounting performance of robots, and is critical for mobile robots working in complicated environments. However, the attempt to increase the obstacle surmounting performance of the robot by improving the single-jump indicators such as jump height and jump distance is usually contradictory to the attempt to increase the movement speed by increasing the jumping frequency of the robot. At present, few robots are capable of continuous, rapid and steered jumping.
In order to solve problems including low driving efficiency and insufficient reliability of software robot in unstructured environment, a high-performance flexible electro-hydraulic driving technology is proposed in the paper. The integrated design method of structural driving is adopted to design a software robot that is capable of rapid and continuous jumping. With a mass of only 1.1g, the robot can achieve a jumping height of 7.68 times its own height and a jumping distance of 6.01 times its body length per second. If two driver modules are connected to form a dual-body robot, a steering speed of 138.4°/s can be achieved, which is the rapidest among the existing software jumping robots. Both robots have desirable movement and obstacle surmounting ability. Through integration of some temperature and humidity sensors, the robot can enter some narrow unstructured environments to carry out environmental perception and detection tasks. The research described in this paper provides a new driving mode and design method for the flexible movement of software robot in unstructured environment, and lays a foundation for the dissemination and application of electro-hydraulic driving technology in software robot.
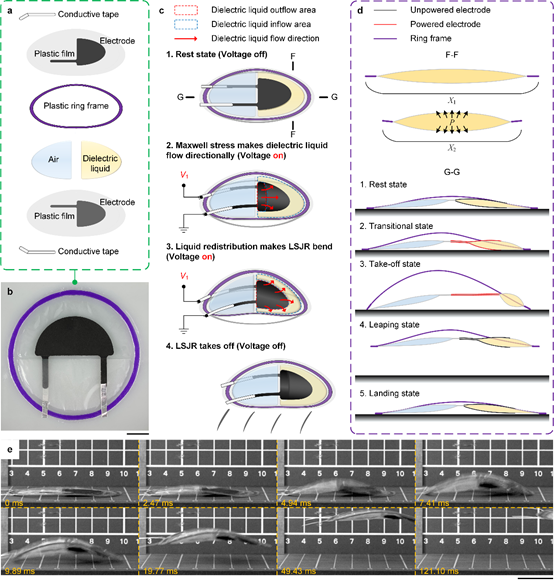
Figures: (a) Structure and composition of the driver; (b) Physical prototype of the robot; (c) Schematic diagram of the jumping process of the robot; (d) Sectional view of the transformation process of the driver; (e) Pictures of the jumping process of the robot taken by a high-speed camera.
This research project has been supported by the National Key R&D Program and general program of the National Natural Science Foundation of China.
Link of the paper: https://www.nature.com/articles/s41467-021-27265-w
