In recent years, unmanned aerial vehicles (UAVs) have been used in an increasing number of tasks the an urban environment. UAVs are particularly helpful as a means of supply delivery, activity monitoring and emergency rescue when disaster strikes and epidemic outbreaks where ground transportation is compromised. The use of UAVs helps reduce casualties and the risk of infection, and shorten the time it takes to complete the task. As for the future development of smart cities, the focus will be on how to further expand the application scope of UAVs so as to reduce the workload of workers engaged in regional coverage, target research and security maintenance. Meanwhile, with opening of low-attitude airspace, the number of UAVs will see a sharp rise, leading to more conflicts between UAVs. In view of this possibility, it is also urgently needed to find a solution to improve the flying safety and use efficiency of UAVs in low-attitude airspace.
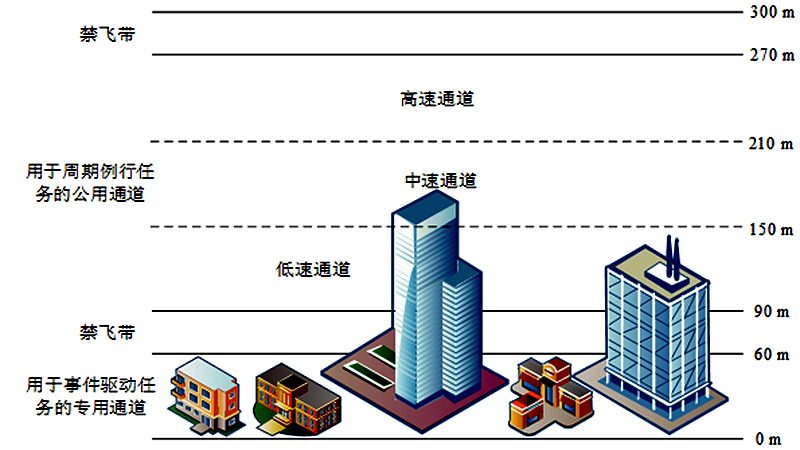
Fig. 1 Hierarchical Division of Low-attitude Airspace
To solve the above problems, Associate Professor Wu Yu and his team built up an urban environment model based on "AirMatrix", an UAV system simulation platform, and defined the flying rules of UAVs. Considering the different requirements for resolution of aerial photo of different ground areas, the team designed a strategy of autonomous flight altitude adjustment for UAVs (Complex & Intelligent Systems, 2021). In order to enable all-angle shooting and locking of moving objects on the ground, a multi-UAV cooperative asynchronous decision-making method was proposed, taking into account circumstances in which the UAV line of sight is blocked by buildings (IEEE Internet of Things Journal, 2022). The team also designed a formation and obstacle avoidance of UAV formation in low altitude flight based on the consistency algorithm in discrete space form (ISA Transactions, 2022). In view of the functional complementation among UAVs, unmanned vehicles and humans, based on the genetic distribution estimation hybrid algorithm, the team generated an air-ground loop route and enabled local adjustment of the loop route in a dynamic environment in order to achieve complete and continuous coverage of the ground area (IEEE Internet of Things Journal, 2021). Moreover, in order to increase the urban security efficiency, the team introduced an air-ground-human system. Based on prediction of the motor pattern of more than 1 object on the ground, the team developed an object search algorithm based on heuristic enumeration and a multi-target capture algorithm based on dynamic grouping, to realize the encirclement and capture of targets in complex situations (Knowledge- d Systems, 2022).
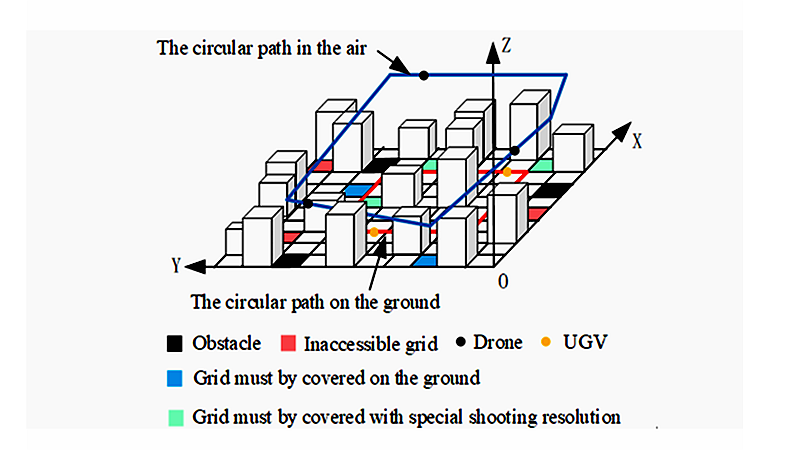
Fig. 2 UAVs and Unmanned Vehicles in the Middle of a Full and Continuous Coverage Task of Ground Areas
As for control and management of UAVs, optional air routes between the starting point and the ending point are provided for each user according to their application for use of low-attitude airspaces. Taking into account the priority of users, with the capacity limit of low altitude airspace as the constraint, a multi-user conflict resolution strategy was designed by the team to generate a UAV flight scheme (IEEE Transactions on Vehicular Technology, 2021). However, the scheme shall be subject to dynamic adjustment to meet the change of external environment and the task. The team summarized the different types of change of tasks and external environment, and proposed an online adaptive reprogramming method (IEEE Systems Journal, 2021). Furthermore, the low-attitude airspace in the future will also enable the bus-like operation of UAVs. The operation efficiency can be significantly increased with a proper scheduling scheme of AirMetro. In the first place, the shortest round-trip flight route of each AirMetro Line can be generated based on the pipeline corridor algorithm, and then the flight conflict solution can be designed based on the adjustment strategy of the hierarchy fairness principle. Finally, the periodic flight schedule can be generated. (Transportation Research Part C: Emerging Technologies, 2021)
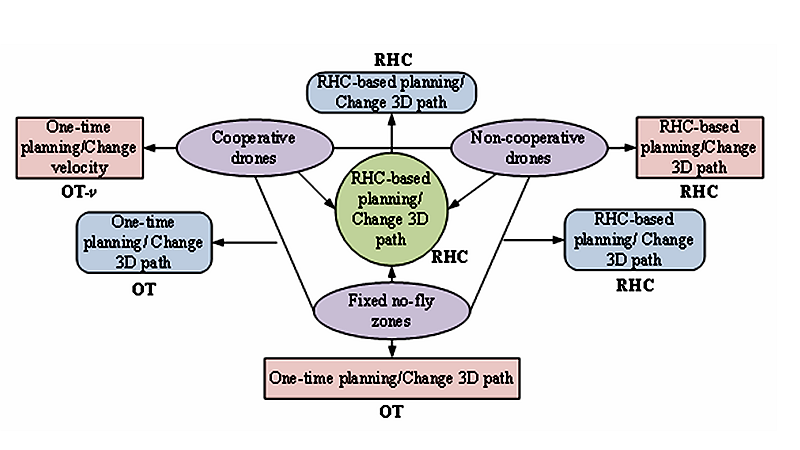
Fig. 3 Adaptive Route Re-planning Strategy for UAVs
The above work has been supported by the National Natural Science Foundation and Natural Science Foundation of Chongqing Municipality. The research findings were published in international journals of CAS Q2 or a higher level. These research findings are the latest progress made by the team in the field of UAV intelligent control and decision-making, and can be used as a powerful tool for analyzing the capacity of low altitude airspace and expanding UAV application scenarios, and provide theoretical basis and technical support for the development of UAV air control system. The team is currently engaged in researches of evaluation of carrier based aircraft dispatch and recovery efficiency and intelligent air combat decision of UAV.
