Wu Yu, a young teacher of the School of Aerospace Engineering, has made a series of original research achievements in trajectory optimization and coordinate path planning for aerial-aquatic vehicle. Wu published an academic paper titled “Dynamics modeling and trajectory optimization for unmanned aerial-aquatic vehicle diving into the water” in Aerospace Science and Technology (JCR Zone Q1, ranking 3/31), a top international journal on aerospace engineering as the first/corresponding author in April 2019, and published an academic paper titled “Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission” in Ocean Engineering (JCR Zone Q1, ranking 2/14), a top international journal on navigation, as the only author. The papers probe into the trajectory optimization of aerial-aquatic vehicle diving into the water and the coordinated path planning for an unmanned aerial-aquatic vehicle, and provide new thoughts on algorithm design and modeling. The research findings are of great theoretical significance and considerable practical application value. The related research projects have been supported by the fund allocated by the Central Military Commission for pre-research of equipment under the “New Technologies of Multi-source/multi-domain Navigation, Path Planning and Control” Program”.
The aerial-aquatic vehicle refers to air vehicles that may operate in both air and water. Due to the noticeable difference between aquatic environment and air environment, it is rather difficult to allow the vehicle to navigate in both of the above two media. The aerial-aquatic vehicle should have the high speed and mobility as UAV, the ability of rapid cruising of unmanned surface vehicle and high elusiveness of unmanned underwater vehicle. As such, it enjoys a broad application prospect in both military area and civilian area.
The aerial-aquatic vehicle is provided with folding wings to reduce the resistance when diving into water. In the diving process, the vehicle is subject to actions of gravity, aerodynamic force, buoyancy force and fluid force. Particularly, the fluid acting force is the most complicated one. Assuming that the fluid acting force is caused by ideal fluid and viscous fluid, calculations are carried out respectively. Influence of the additional mass is considered for calculation of acting force of ideal fluid. For calculation of the viscous resistance, the lift drag coefficient is obtained by numerical simulation. In order to get the optimal diving trajectory of the aerial-aquatic vehicle (to ensure the shortest diving time and the minimum deviation from the designated underwater target), the self-adaption-optimization oriented cuckoo algorithm has been designed. In the search process, this algorithm is able to automatically adjust the parameters based on the current conditions, with influence of the globally optimal solution always taken into consideration. The diving trajectory of aerial-aquatic vehicle obtained using this method is better than the result of particle swarm optimization and standard cuckoo algorithm.
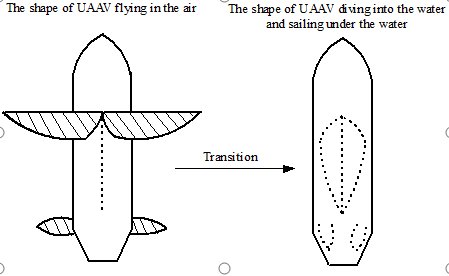
Fig. 1 Appearances of Aerial-aquatic Vehicle in Different Media (In air, the wings are unfolded to guarantee sufficient lift force; during diving and when in water, the wings are folded to reduce resistance)
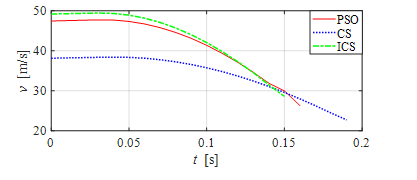
Fig. 2 Diving Speed vs Time Curve (It can be seen that when self-adaptation-optimization oriented cuckoo algorithm ICS is used, the diving time of aerial-aquatic vehicle is the shortest)
While ensuring that the aerial-aquatic vehicle dives into water, Wu Yu carried out further research of the coordination method to form an unmanned system integrating the aerial-aquatic vehicle and the underwater vehicle. The underwater target strike mission is taken as the example. At first, the aerial-aquatic vehicle conducts a survey in the air, and immediately dives into water once the underwater target is discovered. Then it sends the target information to the underwater vehicle and the two would cooperate to attack the target. In this research, motion models, cooperative communication and blowing and constraint model and task index model for the two types of equipment in different media have been established. In addition, the Kalman filtering method is used to accurately forecast the motion of underwater targets. Based on the swarm intelligence optimization theory, a coordinated algorithm is designed to reduce the online calculated amount and improve the coordinated attack effect.
It is reported that Wu Yu is going to carry out aerial-aquatic integrated coordinated control research of UAV, unmanned surface vehicle and unmanned underwater vehicle as combat platforms.
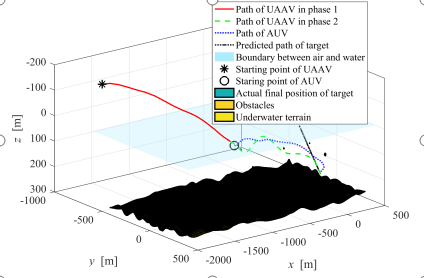
Fig. 3 Coordinated Attack on Underwater Target (In Phase I, the UAAV flies independently in the air; in Phase II, the aerial-aquatic vehicle dives into water and the two pieces of equipment attack the underground moving target.)
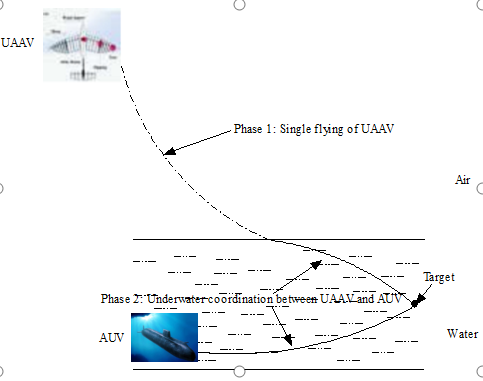
Fig. 4 Result of Coordinated Attack Simulation (the trajectory of the equipment and underwater targets and the submarine topography and barriers are shown)
Paper link 1: https://www.sciencedirect.com/science/article/pii/S1270963818314317
Paper link 2: https://www.sciencedirect.com/science/article/pii/S002980181930191X